Introduction
This is a detailed project documentation for one of the videos we published on youtube. This is about making an IOT plant watering system using raspbery pi pico w
Components required
1) Raspberry Pi Pico W board
2) Relay
3)Usb Cable for program downloading
4) DC Power supply 5v and 12v
5)Water pump 5v
6) Plastic pipe for water distribution
7) Jumper wires
8) Breadboard
9)Small plastic jar for water storage
Circuit diagram for IOT Plant watering system using Rapsberry pi pico W

IOT Plant watering Circuit
Python Program for IOT Plant watering system using raspberry pi pico w
This is the BlynkLib.py, this is library code, use it as is without any changes/modifications
__version__ = "1.0.0"
import struct
import time
import sys
import os
try:
import machine
gettime = lambda: time.ticks_ms()
SOCK_TIMEOUT = 0
except ImportError:
const = lambda x: x
gettime = lambda: int(time.time() * 1000)
SOCK_TIMEOUT = 0.05
def dummy(*args):
pass
MSG_RSP = const(0)
MSG_LOGIN = const(2)
MSG_PING = const(6)
MSG_TWEET = const(12)
MSG_NOTIFY = const(14)
MSG_BRIDGE = const(15)
MSG_HW_SYNC = const(16)
MSG_INTERNAL = const(17)
MSG_PROPERTY = const(19)
MSG_HW = const(20)
MSG_HW_LOGIN = const(29)
MSG_EVENT_LOG = const(64)
MSG_REDIRECT = const(41) # TODO: not implemented
MSG_DBG_PRINT = const(55) # TODO: not implemented
STA_SUCCESS = const(200)
STA_INVALID_TOKEN = const(9)
DISCONNECTED = const(0)
CONNECTING = const(1)
CONNECTED = const(2)
print("""
___ __ __
/ _ )/ /_ _____ / /__
/ _ / / // / _ \\/ '_/
/____/_/\\_, /_//_/_/\\_\\
/___/ for Python v""" + __version__ + " (" + sys.platform + ")\n")
class EventEmitter:
def __init__(self):
self._cbks = {}
def on(self, evt, f=None):
if f:
self._cbks[evt] = f
else:
def D(f):
self._cbks[evt] = f
return f
return D
def emit(self, evt, *a, **kv):
if evt in self._cbks:
self._cbks[evt](*a, **kv)
class BlynkProtocol(EventEmitter):
def __init__(self, auth, tmpl_id=None, fw_ver=None, heartbeat=50, buffin=1024, log=None):
EventEmitter.__init__(self)
self.heartbeat = heartbeat*1000
self.buffin = buffin
self.log = log or dummy
self.auth = auth
self.tmpl_id = tmpl_id
self.fw_ver = fw_ver
self.state = DISCONNECTED
self.connect()
def virtual_write(self, pin, *val):
self._send(MSG_HW, 'vw', pin, *val)
def send_internal(self, pin, *val):
self._send(MSG_INTERNAL, pin, *val)
def set_property(self, pin, prop, *val):
self._send(MSG_PROPERTY, pin, prop, *val)
def sync_virtual(self, *pins):
self._send(MSG_HW_SYNC, 'vr', *pins)
def log_event(self, *val):
self._send(MSG_EVENT_LOG, *val)
def _send(self, cmd, *args, **kwargs):
if 'id' in kwargs:
id = kwargs.get('id')
else:
id = self.msg_id
self.msg_id += 1
if self.msg_id > 0xFFFF:
self.msg_id = 1
if cmd == MSG_RSP:
data = b''
dlen = args[0]
else:
data = ('\0'.join(map(str, args))).encode('utf8')
dlen = len(data)
self.log('<', cmd, id, '|', *args)
msg = struct.pack("!BHH", cmd, id, dlen) + data
self.lastSend = gettime()
self._write(msg)
def connect(self):
if self.state != DISCONNECTED: return
self.msg_id = 1
(self.lastRecv, self.lastSend, self.lastPing) = (gettime(), 0, 0)
self.bin = b""
self.state = CONNECTING
self._send(MSG_HW_LOGIN, self.auth)
def disconnect(self):
if self.state == DISCONNECTED: return
self.bin = b""
self.state = DISCONNECTED
self.emit('disconnected')
def process(self, data=None):
if not (self.state == CONNECTING or self.state == CONNECTED): return
now = gettime()
if now - self.lastRecv > self.heartbeat+(self.heartbeat//2):
return self.disconnect()
if (now - self.lastPing > self.heartbeat//10 and
(now - self.lastSend > self.heartbeat or
now - self.lastRecv > self.heartbeat)):
self._send(MSG_PING)
self.lastPing = now
if data != None and len(data):
self.bin += data
while True:
if len(self.bin) < 5:
break
cmd, i, dlen = struct.unpack("!BHH", self.bin[:5])
if i == 0: return self.disconnect()
self.lastRecv = now
if cmd == MSG_RSP:
self.bin = self.bin[5:]
self.log('>', cmd, i, '|', dlen)
if self.state == CONNECTING and i == 1:
if dlen == STA_SUCCESS:
self.state = CONNECTED
dt = now - self.lastSend
info = ['ver', __version__, 'h-beat', self.heartbeat//1000, 'buff-in', self.buffin, 'dev', sys.platform+'-py']
if self.tmpl_id:
info.extend(['tmpl', self.tmpl_id])
info.extend(['fw-type', self.tmpl_id])
if self.fw_ver:
info.extend(['fw', self.fw_ver])
self._send(MSG_INTERNAL, *info)
try:
self.emit('connected', ping=dt)
except TypeError:
self.emit('connected')
else:
if dlen == STA_INVALID_TOKEN:
self.emit("invalid_auth")
print("Invalid auth token")
return self.disconnect()
else:
if dlen >= self.buffin:
print("Cmd too big: ", dlen)
return self.disconnect()
if len(self.bin) < 5+dlen:
break
data = self.bin[5:5+dlen]
self.bin = self.bin[5+dlen:]
args = list(map(lambda x: x.decode('utf8'), data.split(b'\0')))
self.log('>', cmd, i, '|', ','.join(args))
if cmd == MSG_PING:
self._send(MSG_RSP, STA_SUCCESS, id=i)
elif cmd == MSG_HW or cmd == MSG_BRIDGE:
if args[0] == 'vw':
self.emit("V"+args[1], args[2:])
self.emit("V*", args[1], args[2:])
elif cmd == MSG_INTERNAL:
self.emit("internal:"+args[0], args[1:])
elif cmd == MSG_REDIRECT:
self.emit("redirect", args[0], int(args[1]))
else:
print("Unexpected command: ", cmd)
return self.disconnect()
import socket
class Blynk(BlynkProtocol):
def __init__(self, auth, **kwargs):
self.insecure = kwargs.pop('insecure', False)
self.server = kwargs.pop('server', 'blynk.cloud')
self.port = kwargs.pop('port', 80 if self.insecure else 443)
BlynkProtocol.__init__(self, auth, **kwargs)
self.on('redirect', self.redirect)
def redirect(self, server, port):
self.server = server
self.port = port
self.disconnect()
self.connect()
def connect(self):
print('Connecting to %s:%d...' % (self.server, self.port))
s = socket.socket()
s.connect(socket.getaddrinfo(self.server, self.port)[0][-1])
try:
s.setsockopt(socket.IPPROTO_TCP, socket.TCP_NODELAY, 1)
except:
pass
if self.insecure:
self.conn = s
else:
try:
import ussl
ssl_context = ussl
except ImportError:
import ssl
ssl_context = ssl.create_default_context()
self.conn = ssl_context.wrap_socket(s, server_hostname=self.server)
try:
self.conn.settimeout(SOCK_TIMEOUT)
except:
s.settimeout(SOCK_TIMEOUT)
BlynkProtocol.connect(self)
def _write(self, data):
#print('<', data)
self.conn.write(data)
# TODO: handle disconnect
def run(self):
data = b''
try:
data = self.conn.read(self.buffin)
#print('>', data)
except KeyboardInterrupt:
raise
except socket.timeout:
# No data received, call process to send ping messages when needed
pass
except: # TODO: handle disconnect
return
self.process(data)
Below is the main code for running the project. You can modify it according to your needs about pins usage
import time
import network
from machine import Pin
import BlynkLib
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("Robotics Lab","Robotics@321")
BLYNK_AUTH = 'ozDgrBQOhQv0Hc-8z2oNHSIdscNyEHd6'
# Wait for network connection
wait = 10
while wait > 0:
if wlan.status() < 0 or wlan.status() >= 3:
break
wait -= 1
print('waiting for connection...')
time.sleep(1)
# Handle connection error
if wlan.status() != 3:
raise RuntimeError('network connection failed')
else:
print('connected')
ip = wlan.ifconfig()[0]
print('IP: ', ip)
# Connect to Blynk
blynk = BlynkLib.Blynk(BLYNK_AUTH)
# Initialize the relay pins
relay1_pin = Pin(1, Pin.OUT)
led_pin = Pin("LED", Pin.OUT)
# Register virtual pin handler
@blynk.on("V1") #virtual pin V1
def v1_write_handler(value): #read the value
if int(value[0]) == 1:
relay1_pin.value(1) #turn the relay1 on
else:
relay1_pin.value(0) #turn the relay1 off
@blynk.on("V2") #virtual pin V1
def v2_write_handler(value): #read the value
if int(value[0]) == 1:
led_pin.value(1) #turn the relay1 on
else:
led_pin.value(0) #turn the relay1 off
while True:
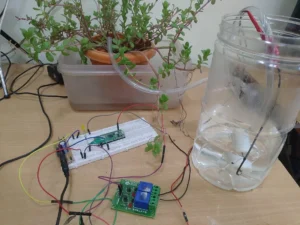
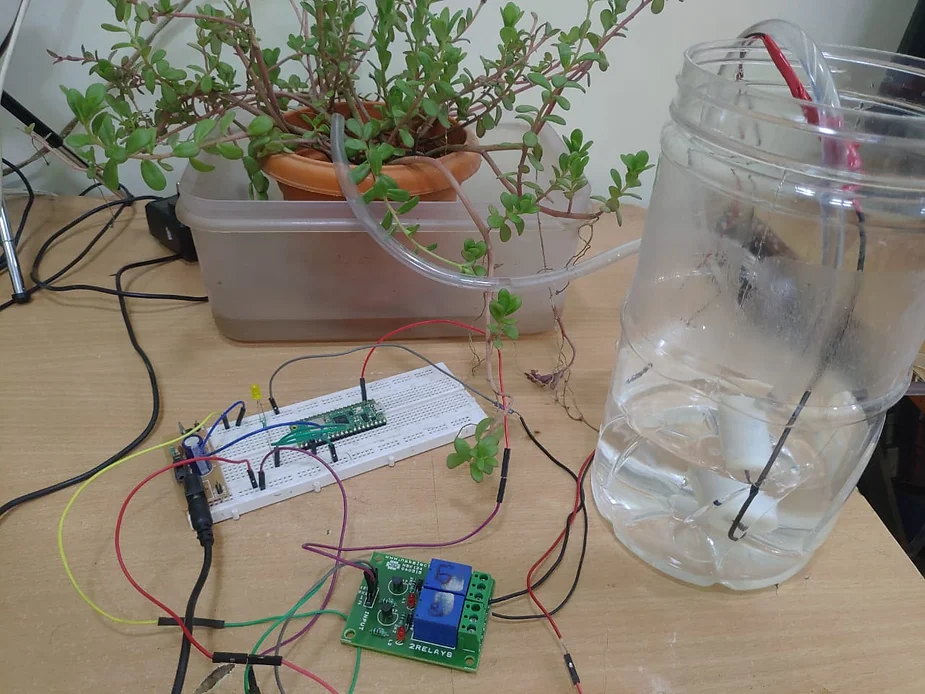
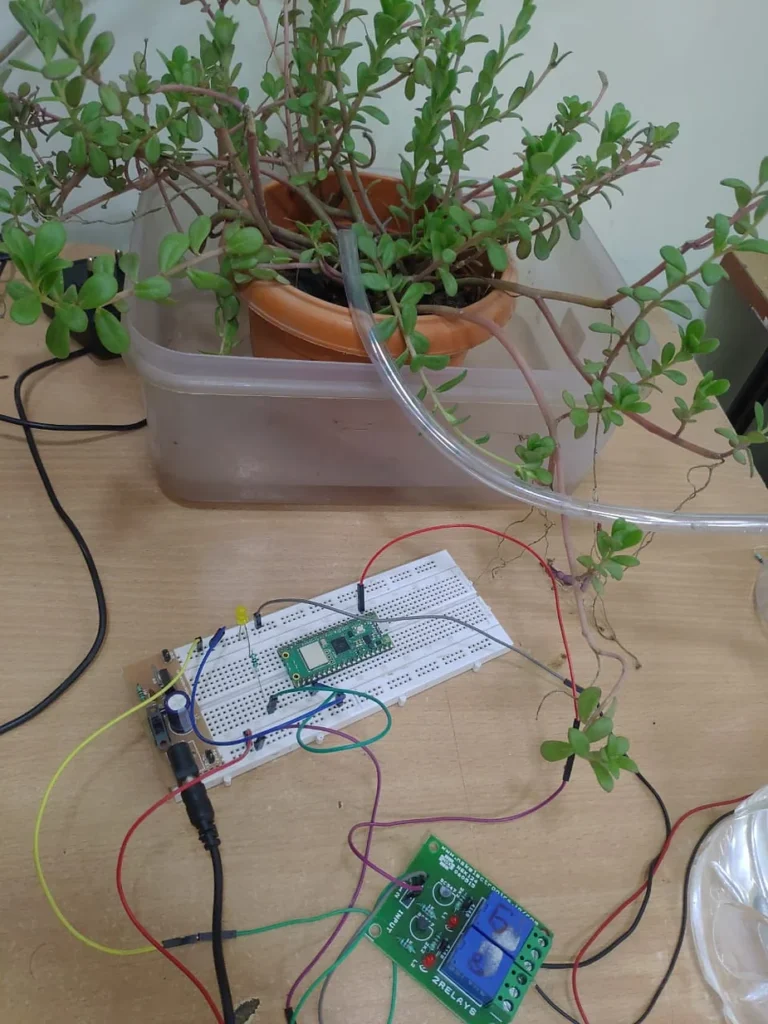
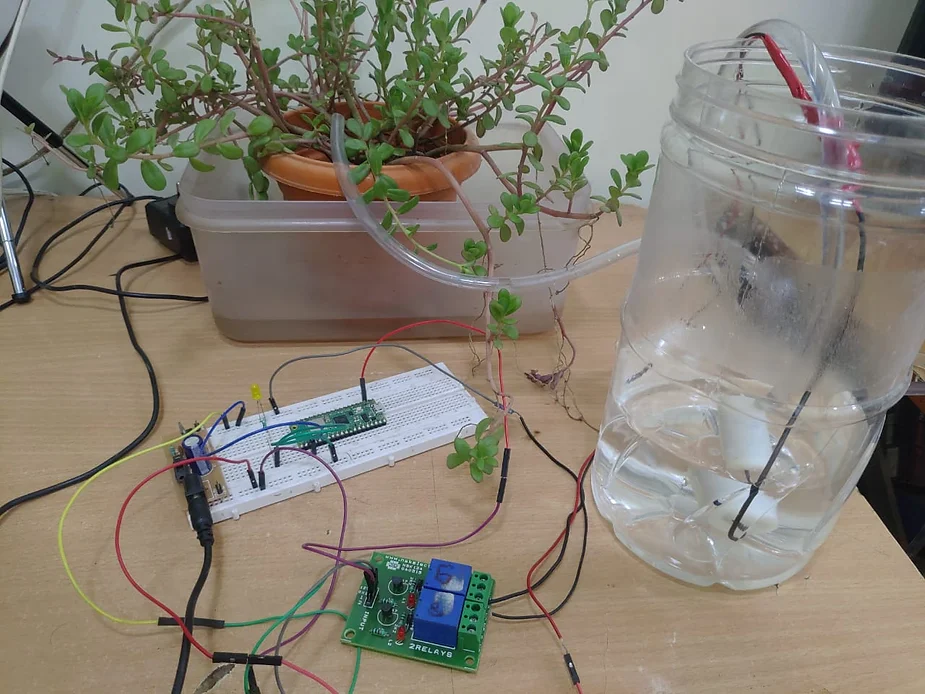
blynk.run()Photos of IOT plant watering system
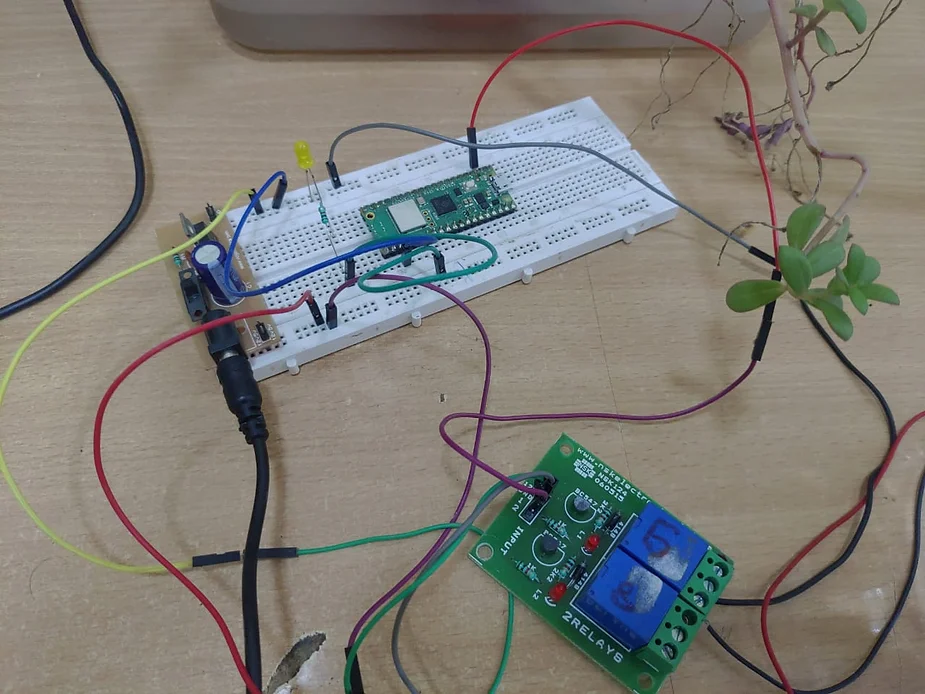
IOT Plant watering project working photo
Working Video of IOT plant watering